远程机器人
远距临场机器人需即时将成像数据从摄像机传输至处理器以进行精确导航,而视觉、听觉和触觉技术须在近乎零延迟的条件下协同工作才能实现临场的水平。
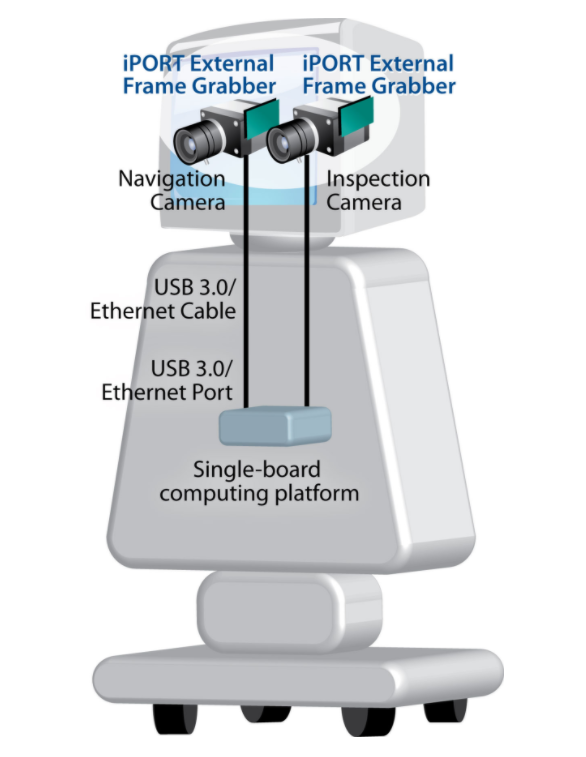
在此应用程序中,来自用于医疗机器人检查和导航的现有摄像机的图像将通过外部图像采集卡转换为以太网或 USB 3.0 视频流。或者,嵌入式视频接口硬件为制造商提供了一种直接将 GigE 或 USB 3.0 视频连接集成到其产品中的简单方法。
视频、电源和控制数据通过灵活、低成本的以太网或 USB 电缆直接传输到集成式单板计算平台上的端口。通过减去机器人中对 PCIe 图像采集卡的需求,制造商可以迁移到嵌入式处理技术,从而降低系统复杂性、元件数量以及成本。此外,较小的占地面积计算有助于减轻机器人的重量和功耗,延长电池寿命,进而在两次充电之间实现更多次的患者就诊。
独特优势
- 迁移到嵌入式计算
- 降低成本和复杂性
- 延长电池供电机器人的使用寿命
相关产品

